“Lo bueno de la ciencia es que es cierta, creas o no en ella” - Neil deGrasse Tyson
Descripción del proyecto
¿En qué consiste?
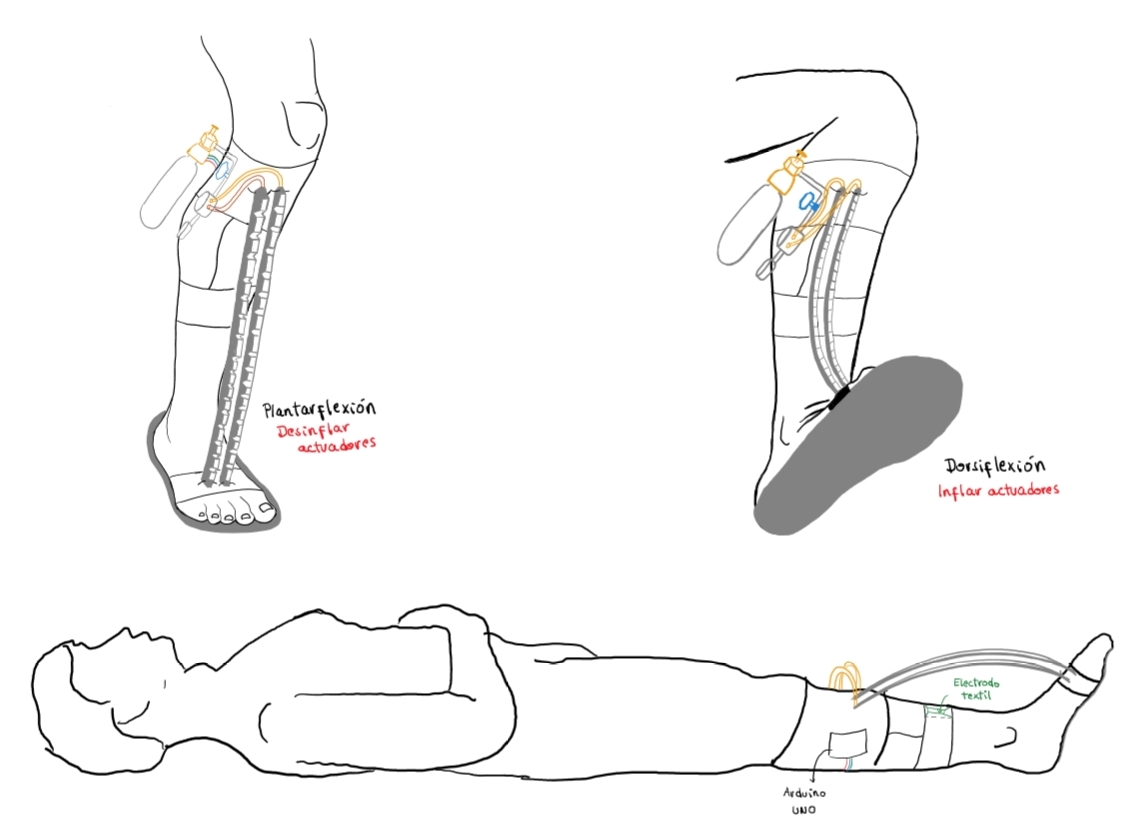
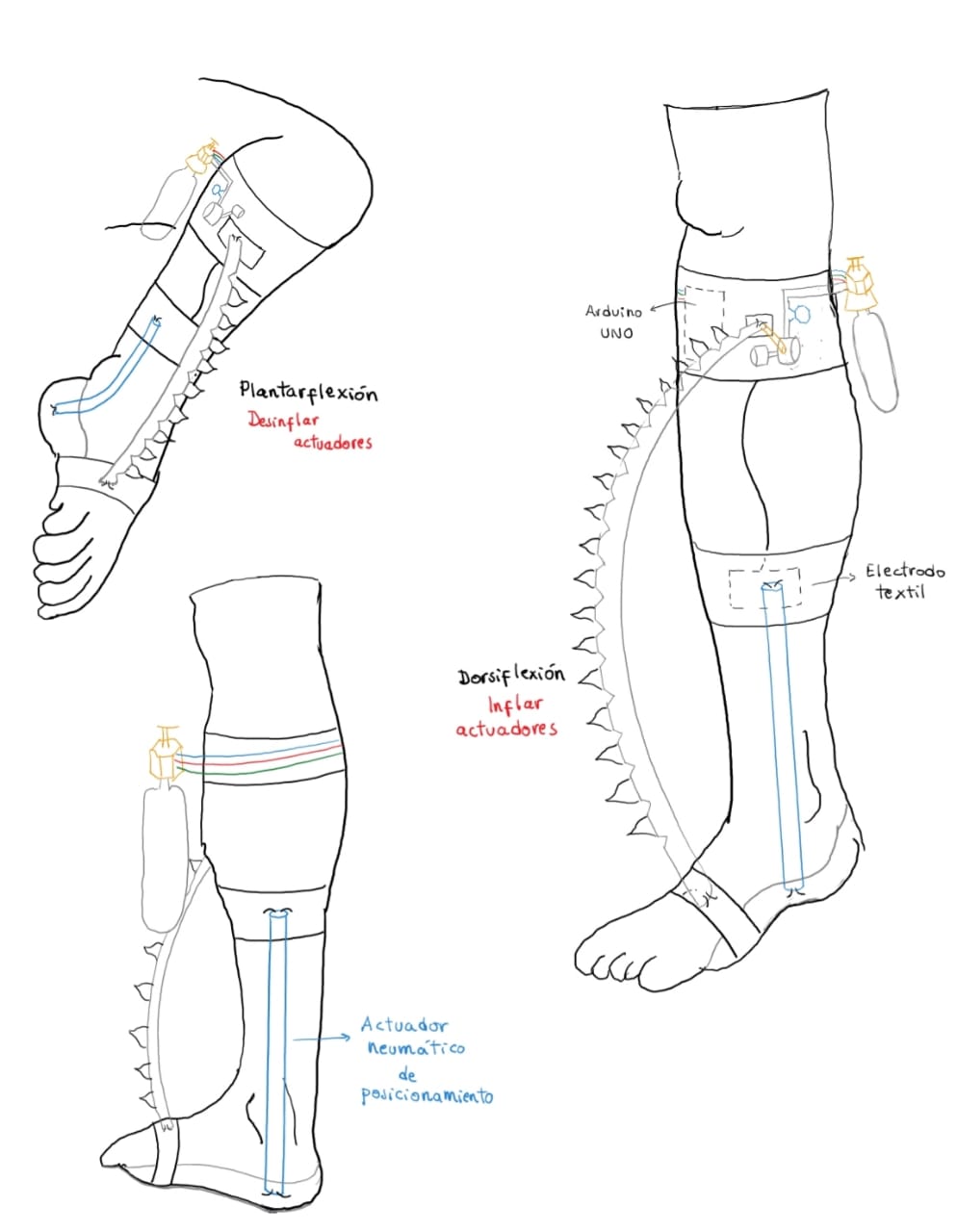
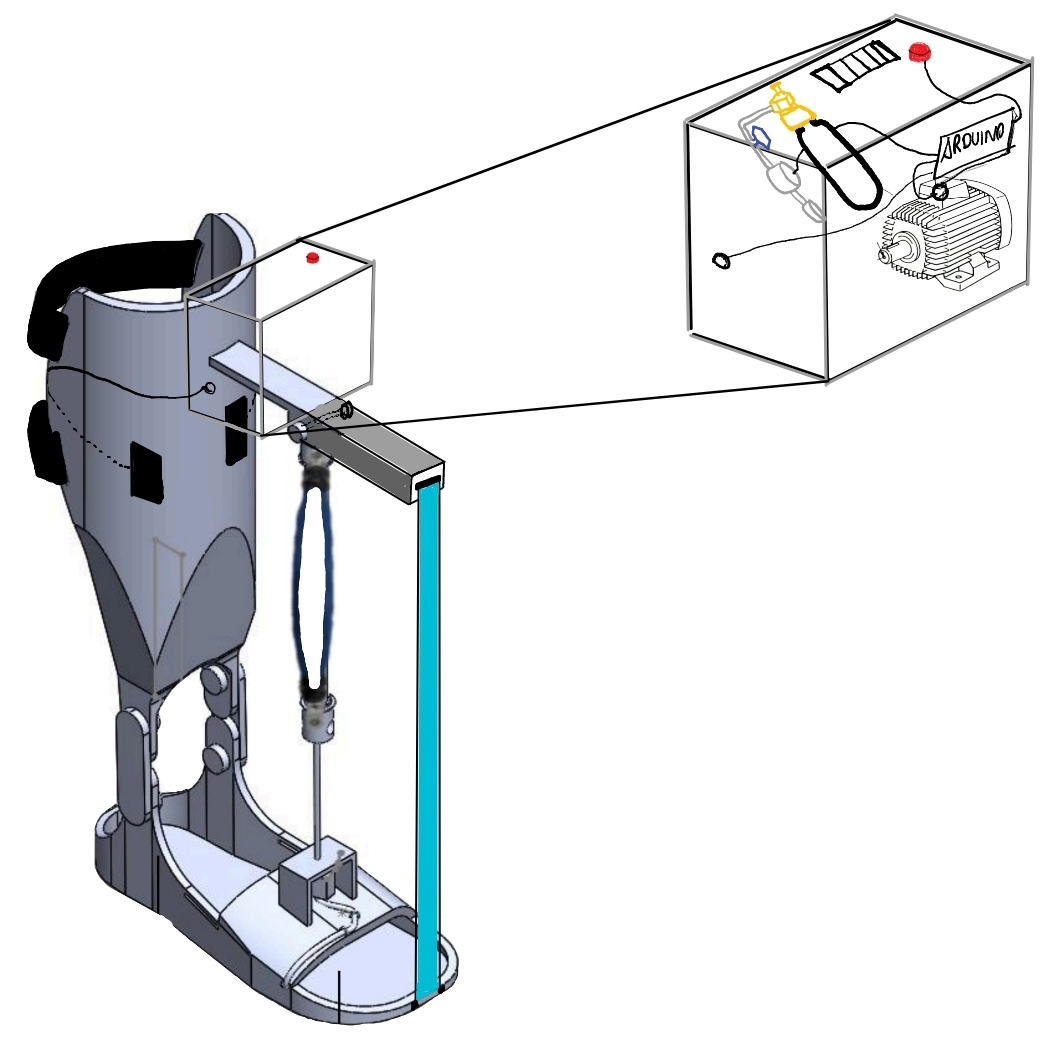
Nuestro proyecto consiste en una órtesis dinámica para el tobillo del pie, la cual se basa en el uso de actuadores neumáticos de robótica blanda para realizar el movimiento de plantarflexion y dorsiflexion. Los actuadores cuentan con un movimiento contráctil y lineal, operado por presión de aire de una válvula neumática. A medida que el actuador se llena de aire, se extenderá asistiendo en la dorsiflexión, y cuando se expulse el gas, todo el actuador se contraerá asistiendo así en la plantarflexión. De esta manera se producirá torque para asistencia propulsora y control de los movimientos del tobillo. Este dispositivo será útil para la prevención de Trombosis Venosa Profunda en pacientes tetrapléjicos, quienes se encuentran en riesgo como consecuencia de la dismovilidad de los miembros inferiores
¿Donde y cómo se coloca?
El diseño del dispositivo le permite ser colocado de forma manual al igual que bota de uso diario. Este debe ser colocado en la zona de la pantorrilla, sobre el músculo tibial anterior y por debajo de la rodilla. El electrodo textil que permitirá las contracciones musculares será posicionado sobre el músculo tibial anterior debido a que el músculo tibial anterior y el quadriceps presentan entre 2 y 3 puntos motores que inervan otras porciones musculares, a diferencia de otros músculos que presentan solo 1 punto motor [1]. Se ha demostrado que los músculos del compartimento posterior profundo de la pierna (poplíteo, flexor largo del dedo gordo, tibial posterior, flexor largo de los dedos) están inervados por una o dos ramas motoras primarias que surgen del nervio tibial [2].
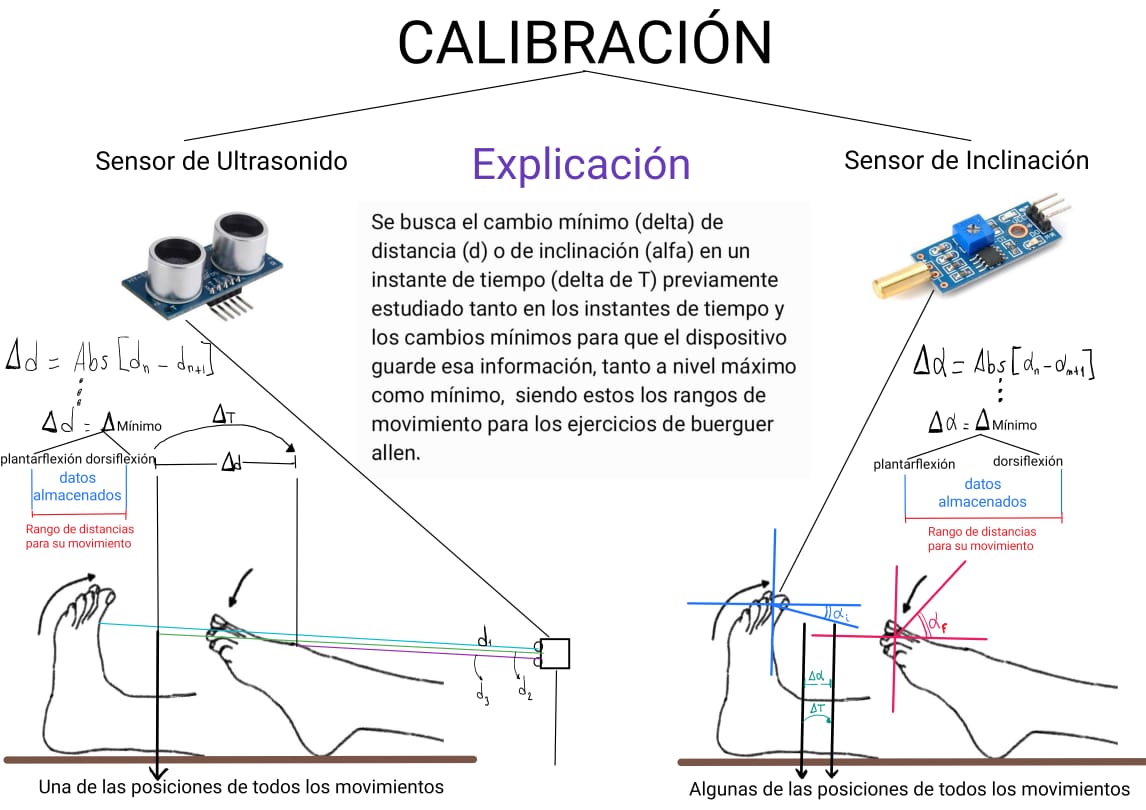
Calibración y optimización
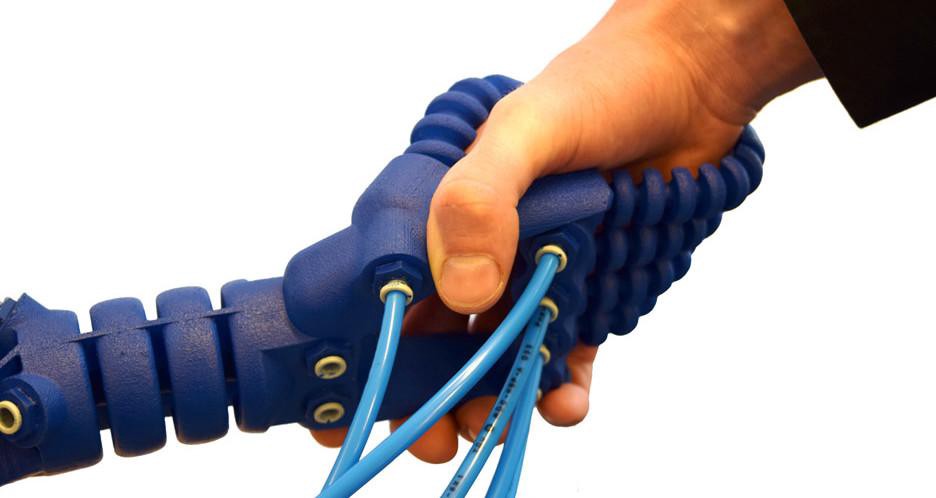
¿Cómo funciona la robótica blanda y los actuadores neumáticos?
El proyecto consta de actuadores de robótica blanda que realicen los movimientos de dorsi y plantar flexión. Los cuales, funcionan a través del control interno de presión neumática. El mecanismo para controlar la presión interna se da a travez de un microcontrolador que acciona válvulas de presión, las cuales van conectadas a actuadores de robótica blanda. [3]
Por otro lado, se puede adjuntar al actuador módulos de inflación independientes a través de una columna vertebral común, la cual funciona como fijador de la pierna. Dicha columna está construida principalmente materiales de impresión 3d flexible, tales como el TPU (NinjaFlex; NinjaTek, Inc), en impresoras de alto rendimiento tales como la LulzBot. [4]
Proyectos preliminares
Proyecto preliminar 1 (P.P 1)
Proyecto preliminar 2 (P.P 2)
Proyecto preliminar (P.P 3)
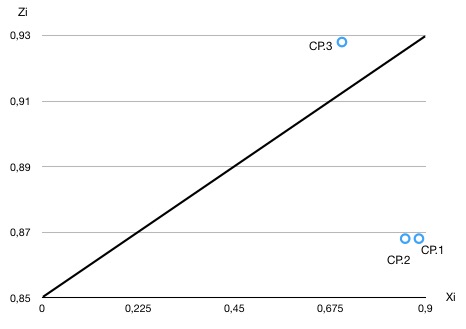
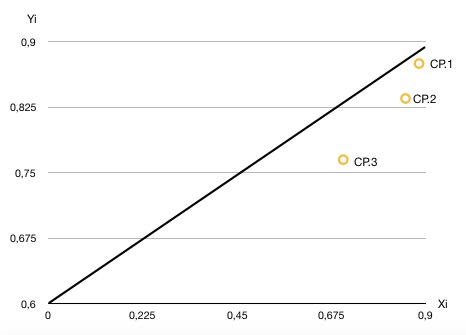
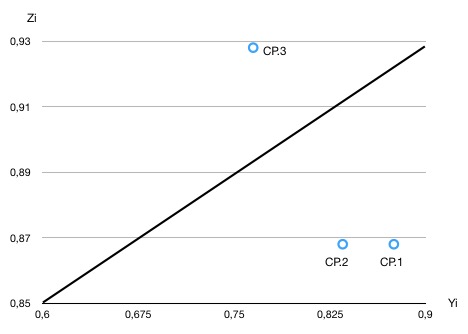
Matrices y proyecto óptimo
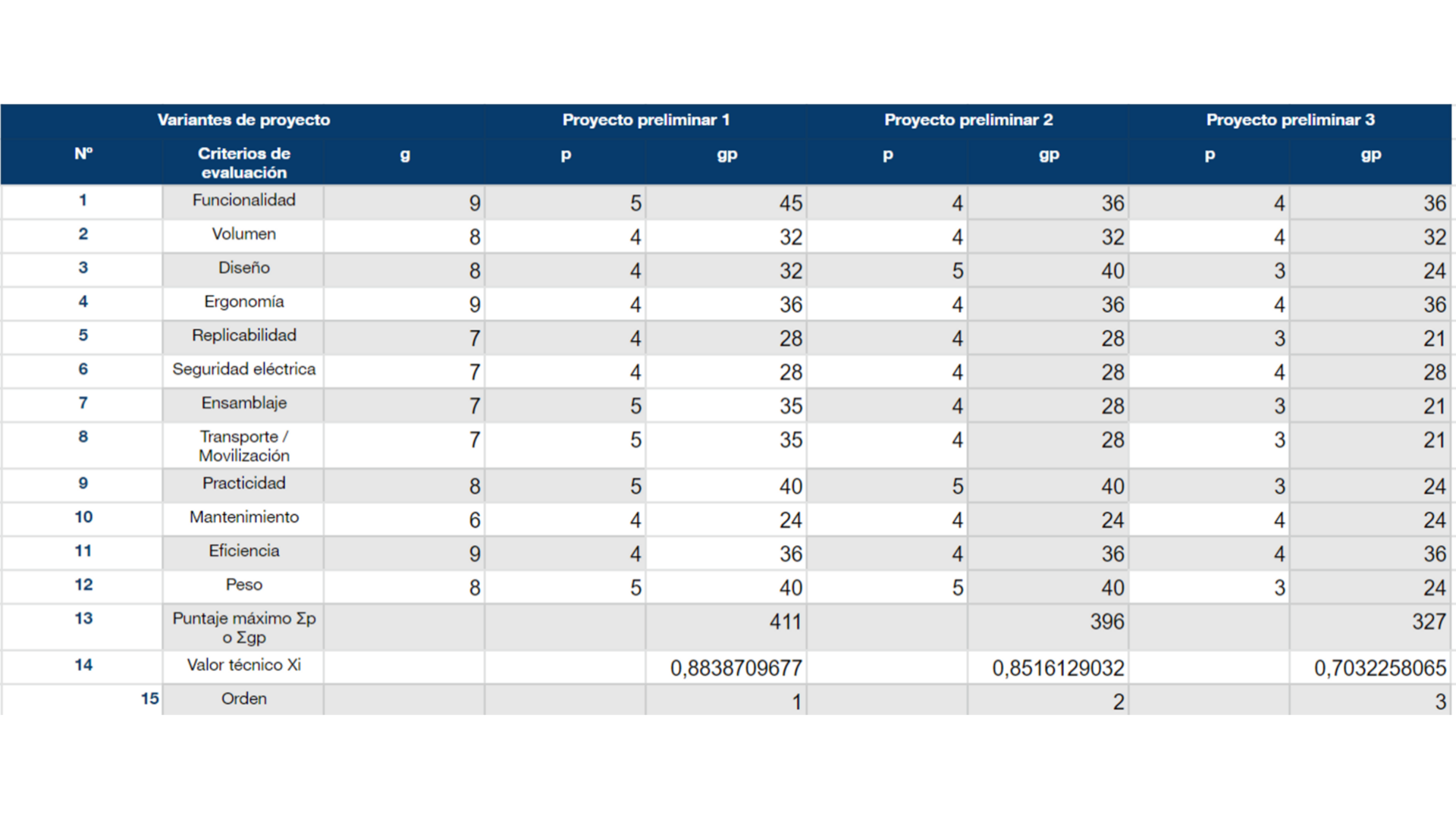
Matriz de evaluación técnica (Xi)
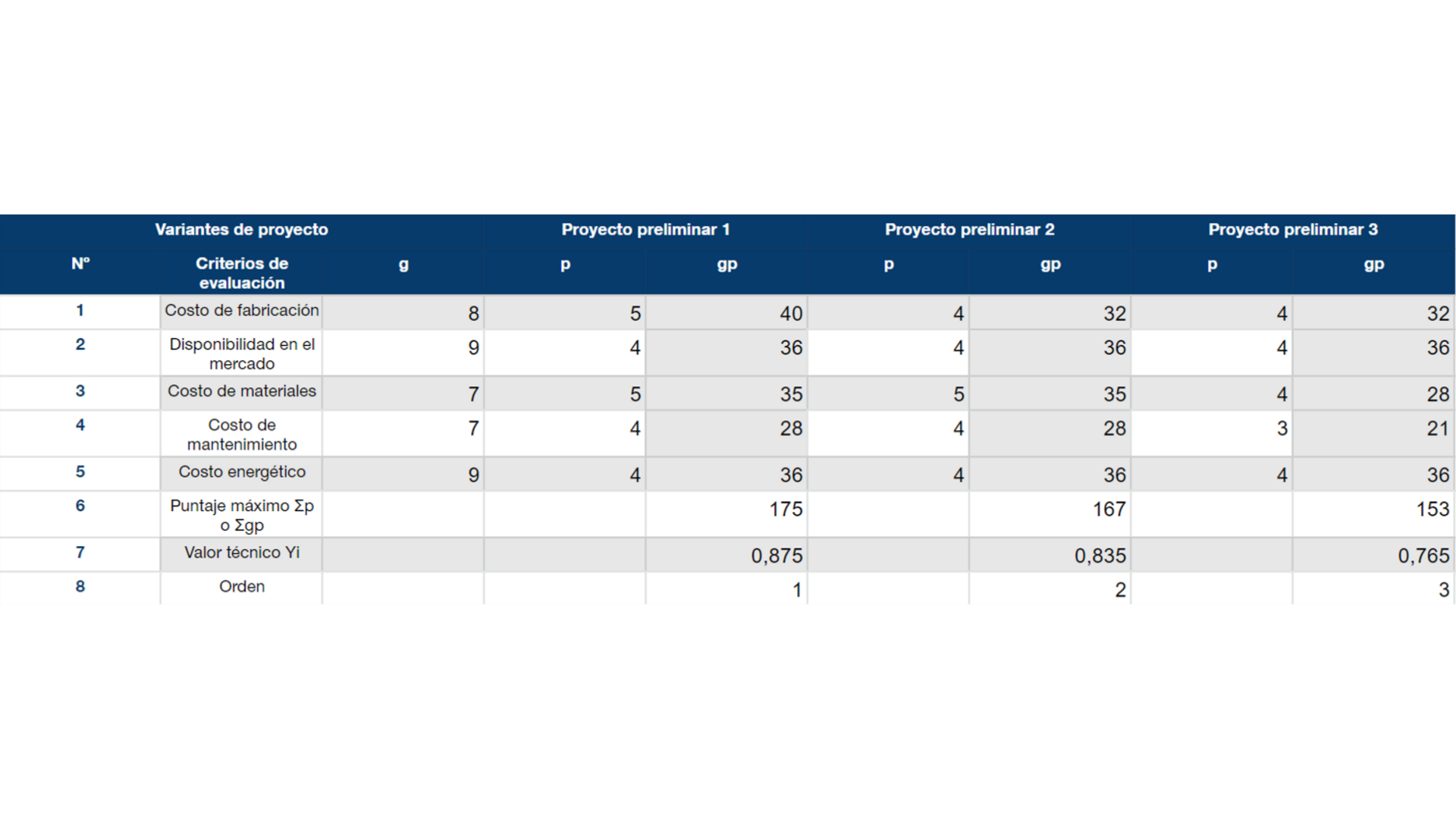
Matriz de evaluación económica (Yi)
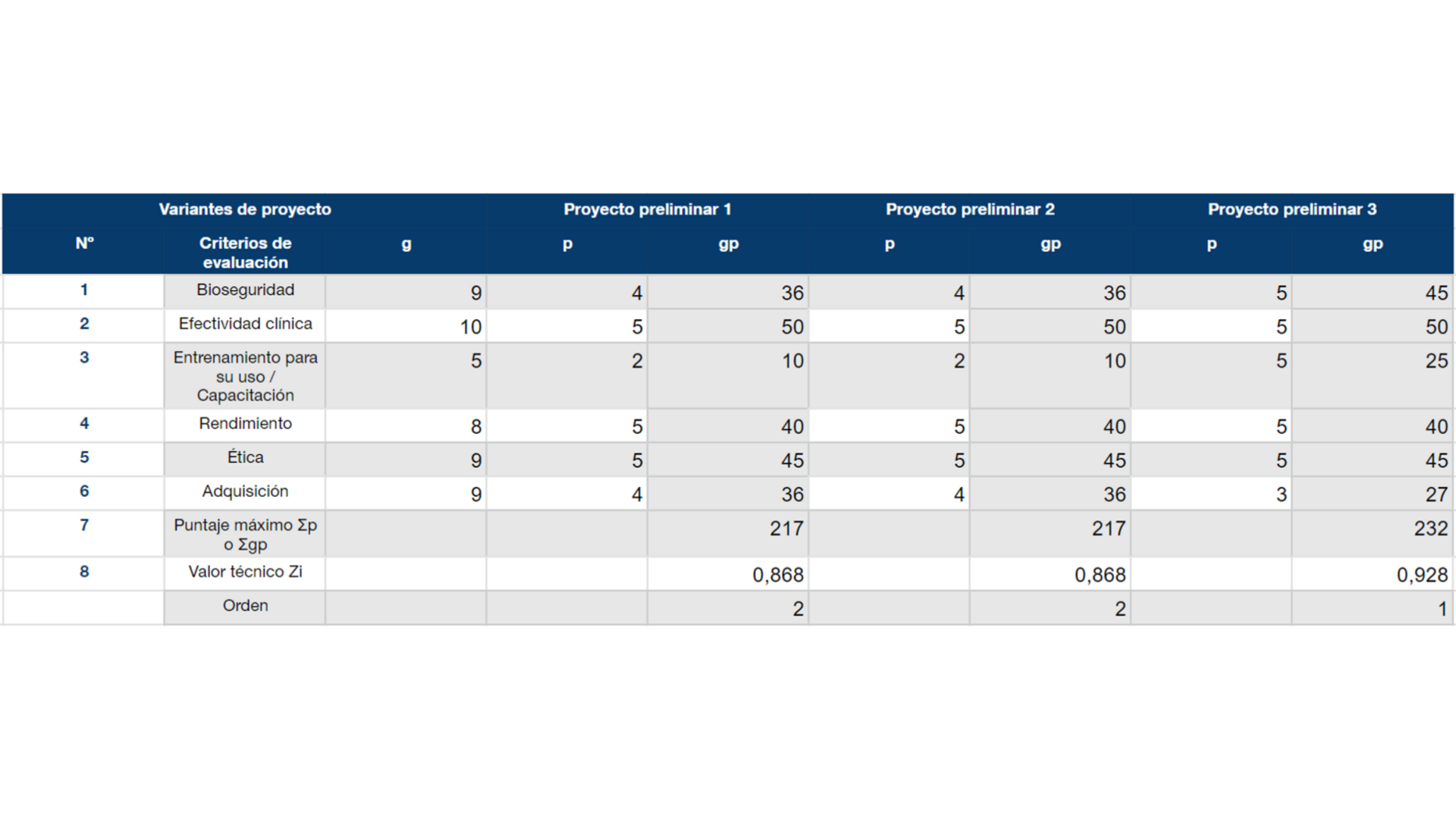
Matriz de evaluación tecnológica (Zi)
Proyecto optimo
Proyecto ganador: (P.P 2)
[1 ]Botter A. et. al. (2011) Atlas of the muscle motor points for the lower limb: implications for electrical stimulation procedures and electrode positioning. Eur J Appl Physiol 111:2461–2471 . Recuperado de: https://www.ncbi.nlm.nih.gov/pubmed/21796408 [2] Apaydin N. et al. (2008) The precise localization of distal motor branches of the tibial nerve in the deep posterior compartment of the leg. Surg Radiol Anat 30:291–295. Recuperado de: https://www.ncbi.nlm.nih.gov/pubmed/18283390 [3] Low F, Lim J, Kapur J, Yeow R. Effect of a Soft Robotic Sock Device on Lower Extremity Rehabilitation Following Stroke: A Preliminary Clinical Study With Focus on Deep Vein Thrombosis Prevention. IEEE Journal of Translational Engineering in Health and Medicine. 2019;7:1-6. [4] Natividad R, Del Rosario M, Chen P, Yeow C. A Reconfigurable Pneumatic Bending Actuator with Replaceable Inflation Modules. Soft Robotics. 2018;5(3):304-317.